This paper introduces an innovative solution to water pollution through the development of a remote-controlled floating waste cleanup system. Designed to autonomously collect floating waste from water bodies, the system minimizes human intervention while ensuring safe and efficient operations. It incorporates a belt-driven waste collection mechanism that continuously gathers debris into a designated collector bin, powered by a battery charged via a solar panel to promote sustainable energy use. The cleanup vessel is equipped with an ESP32-CAM module that enables live video streaming for real-time remote monitoring, allowing operators to oversee the cleaning process effectively. An integrated ultrasonic sensor measures the fill level of the collector bin, providing essential feedback to ensure timely waste disposal. Additionally, a web-based dashboard offers wireless control, enabling operators to manoeuvre the vessel in multiple directions—forward, reverse, left, and right, while managing the activation of the conveyor belt. Overall, this system not only improves the efficiency of water surface cleaning but also reduces the risks and labor associated with manual cleanup operations. It demonstrates a scalable, environmentally friendly solution for maintaining cleaner aquatic environments through the integration of automated control, renewable energy, and real-time monitoring technologies

Breast cancer is a primary cause of mortality among women across the world, and early diagnosis and ...

The Internet of Vehicles, or IoV, is a disruptive technology that comes with very minor latency time...

Wheat is a major food commodity in the world, but it faces serious disease attacks, which have cause...
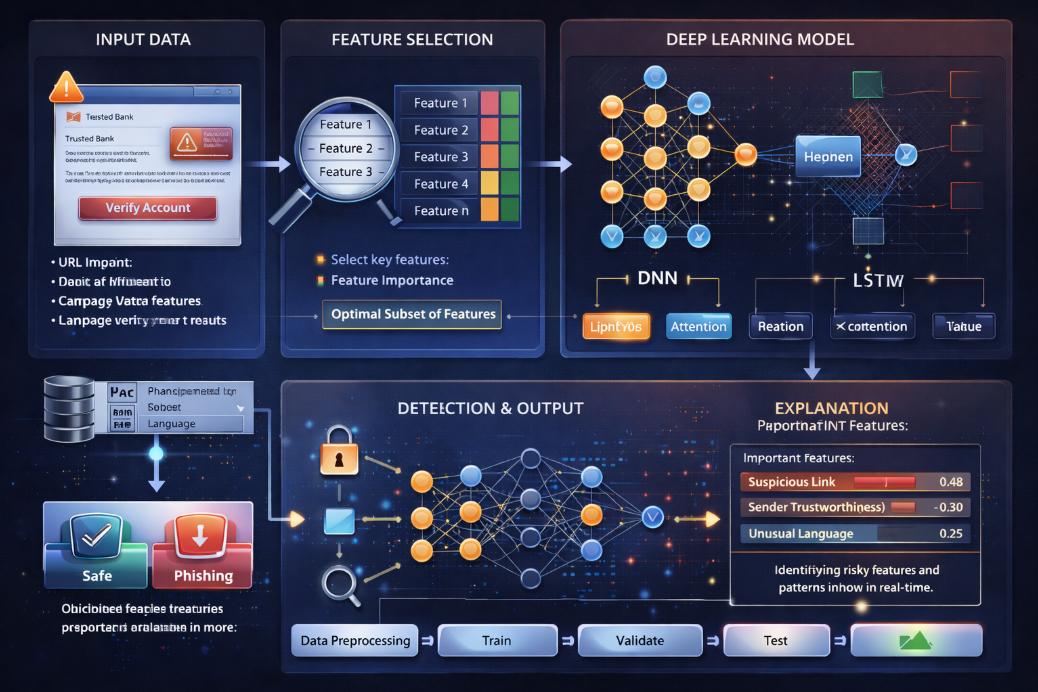
Phishing attacks have become a key cybersecurity threat and have used the trust of users in order to...